Level:
Undergraduate
Instructors:
Prof. Thomas Peacock
Prof. Nicolas Hadjiconstantinou
Prof. Sanjay Sarma
Prof. Peter So
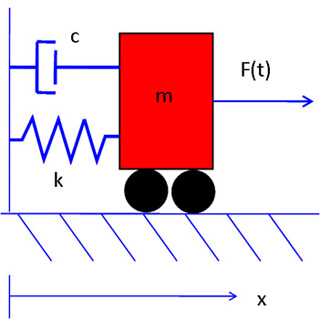
A moving cart attached to a wall by a spring and a dashpot. The
equations of motion for every 1-degree-of-freedom system can be
linearized around the equilibrium points to the second order
differential equation that describes this system. Thus, understanding
the free response and selected forced responses for this system can
give deep insight into the stability of the equilibrium points and the
behavior of a large number of systems. See Lectures 20 and 21 for more
information. (Image by MIT OCW.)
Course Features
Course Highlights
Course Description
Introduction to the dynamics and vibrations of lumped-parameter models
of mechanical systems. Kinematics. Force-momentum formulation for
systems of particles and rigid bodies in planar motion. Work-energy
concepts. Virtual displacements and virtual work. Lagrange's equations
for systems of particles and rigid bodies in planar motion.
Linearization of equations of motion. Linear stability analysis of
mechanical systems. Free and forced vibration of linear multi-degree of
freedom models of mechanical systems; matrix eigenvalue problems.
Introduction to numerical methods and MATLAB® to solve dynamics and
vibrations problems.
Recommended Citation
For any use or distribution of these materials, please cite as follows:
Thomas Peacock, Nicolas Hadjiconstantinou, Sanjay Sarma, and Peter
So, course materials for 2.003J/1.053J Dynamics and Control I, Spring
2007. MIT OpenCourseWare (http://ocw.mit.edu), Massachusetts Institute
of Technology. Downloaded on [DD Month YYYY].